Within the laboratory, theoretical and applied research is conducted on all types of equipment used in manufacturing processes. This category includes serial industrial robots and mobile robots. Thus, the laboratory's equipment includes KUKA KR 210, KR 6-2, and ABB 1400 serial industrial robots with six degrees of freedom.
With the help of KUKA robots, an experimental setup has been arranged to study the incremental forming process using industrial robots as technological processing equipment. The use of industrial robots allows the generation of complex trajectories and, consequently, the achievement of highly complex shaped parts through the incremental forming process.
Theoretical and experimental research within the Laboratory of Automation and Robots is also facilitated by software packages such as Matlab & Simulink, B&R Automation Studio, ABB Robot Studio, KUKA KRC, and Technosoft Easy Motion.

To deepen experimental research in the field of incremental forming using industrial robots, the laboratory has also been equipped with two robotic arms from the manufacturer ABB, model IRB 1200. Both robots are equipped with six degrees of freedom and allow synchronized movement. They are used to study control and coordination algorithms, aiming to ensure precision and efficiency in manufacturing processes. Additionally, the ABB robots enable the modeling and simulation of forming processes, contributing to the determination of material behavior and the optimization of process parameters.

Another piece of equipment with which the Laboratory of Robots and Mechatronic Systems is equipped is the FANUC Cell. This setup allows the development of practical skills in robot programming and automation by easily integrating various peripheral devices. The equipment includes an ER-4iA industrial robot with six axes of movement, a teach pendant, an SC130EF1 B/W monochrome industrial CMOS camera, and an R-30iB Mate Plus controller. The ER-4iA ensures high flexibility and dexterity, being equipped with an EGP 40-N-N-B electric end effector from the manufacturer Schunk, ideal for handling small parts. This equipment allows for a wide range of research studies, such as advanced robot programming, the integration of systems equipped with visual sensors, industrial process automation, precise object manipulation, and the interconnection of peripheral devices. The FANUC Cell thus offers a complete and flexible platform for developing the necessary skills in the fields of robotics and industrial automation.
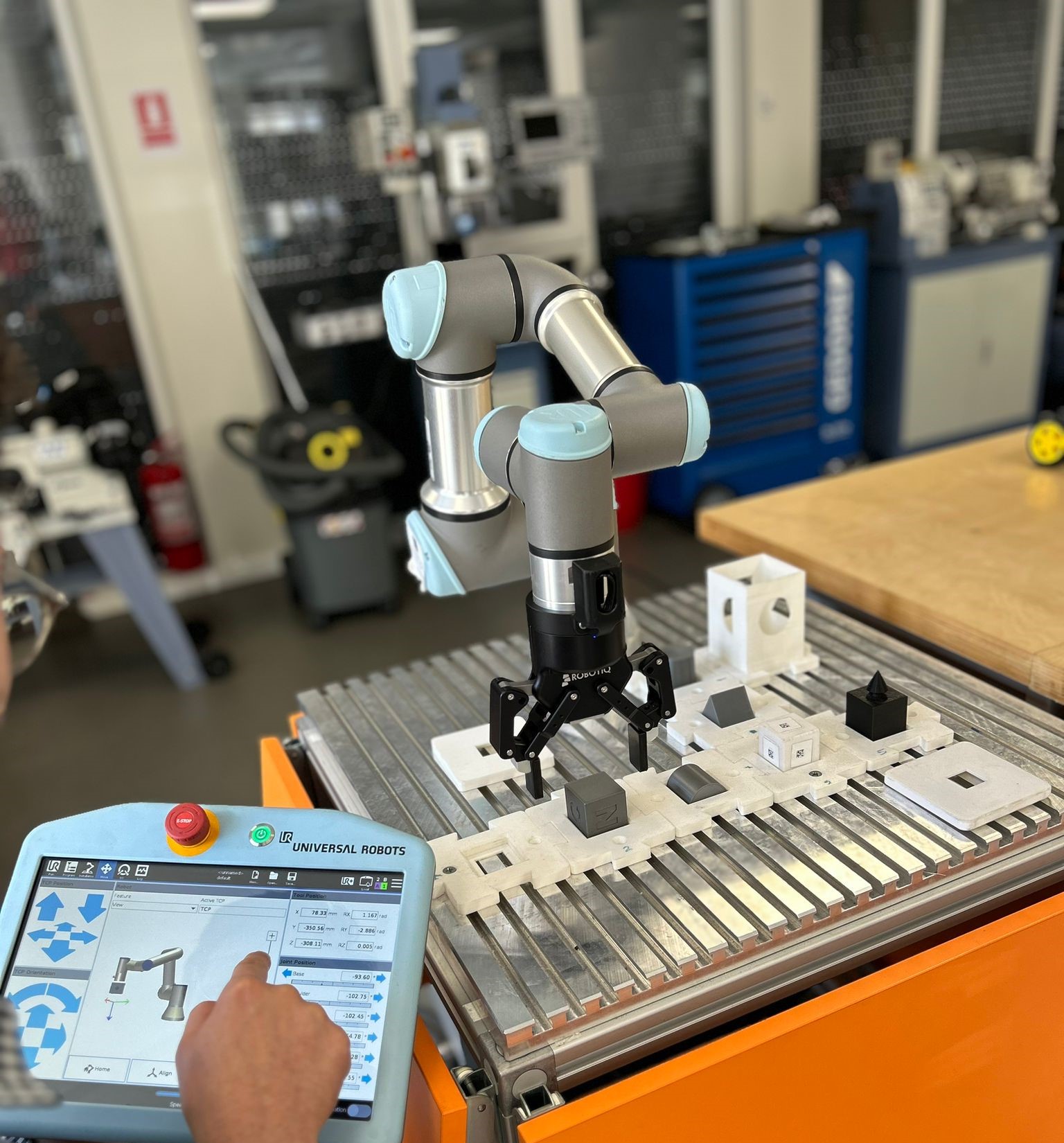
Another piece of equipment in these laboratories is the collaborative robot UR3e. This robot allows for applications involving the manipulation of small parts using the 2F-85 end effector, with a load capacity of up to three kilograms. The robot is also equipped with a compact camera from Robotiq, which can be used for part recognition and sorting. Additionally, practical applications can be tested using the URSim software simulator, which replicates the programming and operating environment of UR robots. The programming and research process enabled by the UR3e robot is further facilitated by a structured database of interactive courses available on the UR Academy platform.
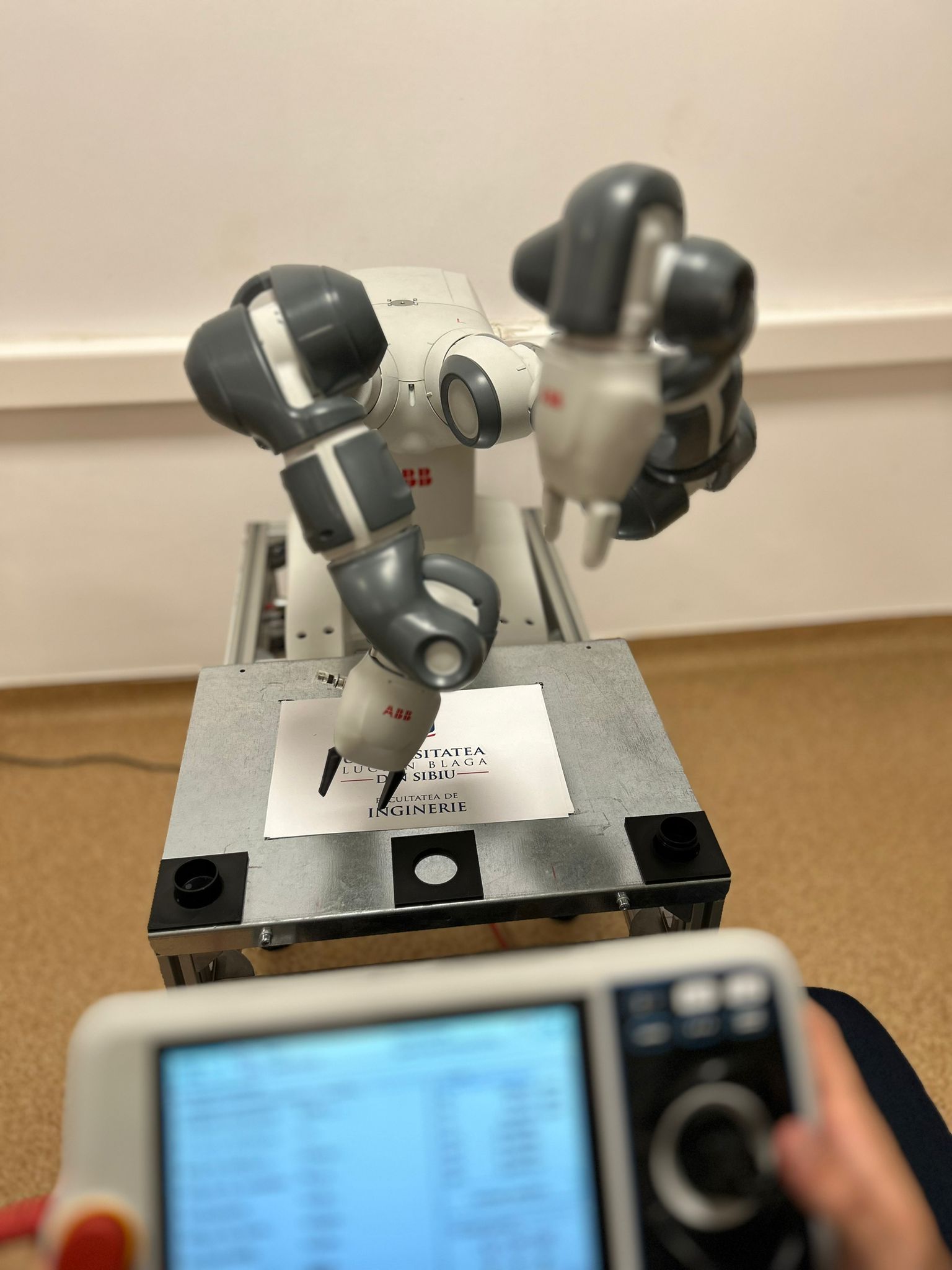
To acquire skills related to programming collaborative industrial robots, the laboratory also features a Yumi Dual-arm collaborative robot (IRB 14000) from ABB, which can be integrated into flexible manufacturing cells. The two arms, each with seven degrees of freedom, offer a high level of dexterity and flexibility for a wide range of tasks. This type of robot is used for studying the kinematics and dynamics of redundant serial robots, using the MATLAB-Simulink development environment. Research based on this robotic system focuses on identifying energy-efficient algorithms and methods for following imposed trajectories.
Within this laboratory, applied research activities are conducted to develop multifunctional robotic platforms with which the student teams Cybertech and Powerbot have achieved remarkable results in national RObotX competitions (1st/2nd place in 2015, 2016, 2017, 2018, 2019) and international EUROBOT competitions (10th/18th place in 2015, Yverdon les Bains, Switzerland, 5th/6th place in 2016, Le Kremlin Bicetre, France, 21st/12th place in 2017, Roche sur Yon, France, 7th/14th place in 2018, Roche sur Yon, France, 5th/12th place in 2019, Roche sur Yon, France).
The laboratory is equipped with various pneumatic and hydraulic actuation systems from FESTO and SMC. One of the laboratory's experimental and didactic bases (Room IM 203) was recently modernized in 2019 with financial support from the company Continental.

Among the advanced pneumatic systems available in the laboratory are educational modules for training in pneumatics and electro-pneumatics: FESTO TP 101, FESTO TP 102, and FESTO TP 201. Additionally, there is the FESTO MPS 202 mechatronic training module and the MPS 402-1 R station, which represents an advanced learning and research platform created by Festo. This platform is designed for simulating and optimizing industrial production processes. The modular system integrates modern technologies for automation and control, offering modules for assembly, material handling, testing, and inspection. The educational system for illustrating and integrating Industry 4.0 concepts has a high degree of modularity, ensuring a clear and manageable learning path composed of modules from stations to a training factory controlled by software. The educational software environment around a specially developed MES (Manufacturing Execution System) for educational use provides easy access to complex software topics in the factory automation environment. The learning process is supported by modern environments such as QR codes and AR (Augmented Reality) for information delivery, as well as interaction with the learning system based on augmented reality.

Robotino is robust and versatile, capable of navigating efficiently in various environments and working conditions, being used for tasks such as transport, inspection, and object handling. Its programming and control are accomplished using modern programming environments such as ROS (Robot Operating System), which facilitates the development of complex applications and integration with other systems. In an educational setting, this type of mobile robot can be used to train students in programming and managing mobile robots, preparing them for future careers in robotics and automation. In the research field, Robotino is used for testing and developing new technologies, exploring the potential of autonomous and intelligent applications in various industries. All these modules are controlled through the FluidSIM software package. This software is designed for the study of fluid systems, including pneumatics, hydraulics, and electrical engineering. Developed to facilitate high-precision simulation and design, FluidSim 6 provides an integrated platform that supports the development and optimization of pneumatic, electrical, and hydraulic installations.
FluidSim 6 allows for detailed real-time simulation of pneumatic and hydraulic systems, providing researchers with tools to analyze and model their behavior with a signal processing rate of up to 10 kHz. This capability is essential for exploring and testing automation applications.
The software covers a wide range of applications, from pneumatics and electropneumatics to hydraulics and electrohydraulics. In the field of electrical engineering, FluidSim 6 allows for the design and simulation of both direct current (DC) and alternating current (AC) electrical circuits. Its advanced functionalities include simulating and monitoring industrial processes essential for improving system performance and stability. A key aspect of FluidSim 6 is its support for creating and managing GRAFCET diagrams, facilitating the research of control strategies and the optimization of automation processes. The ability to simulate faults and monitor processes in real-time provides a robust environment for testing and validating control systems.
FluidSim 6 integrates with various equipment and PLCs, enabling connectivity with controllers, real systems, and 3D simulation software. This flexibility is beneficial for engineering research areas, allowing complex systems to be tested and controlled in an integrated and adaptable environment. The software is equipped with comprehensive educational resources and flexible licensing options, making it ideal for use in research and education. FluidSim 6 is not just a simulation tool; it is a research platform that facilitates innovation in fluid systems.
Additionally, the laboratory is equipped with the FESTO MecLab modular mechatronic system, designed for research into modular construction, control, and programming of mechatronic systems. Another advanced mechatronic system in the laboratory is the bi-axial system with stepper motors and SMC MAP 202 linear pneumatic motors.
The laboratory's automation systems are based on state-of-the-art Siemens SIMATIC S7 1200 programmable logic controllers (PLCs) (6 units), programmed with the latest version of Siemens TIA Portal v. 15 software (6 workstations).
The laboratory is also equipped with automation systems based on ATMEL AVR microcontroller boards, Arduino Nano (12 units), and Arduino Mega (12 units).
Additionally, the laboratory features additive manufacturing equipment, including the Ultimaker 3 Extended 3D printer, which enables the creation of complex-shaped parts with mechanical properties comparable to those produced by subtractive manufacturing processes (machining).
Within the research center's laboratories, a series of service mobile robots have been designed and built.

The autonomous mobile lawn mowing robot offers opportunities for testing and perfecting autonomous navigation algorithms, which are essential for the efficient operation of mechatronic systems. Additionally, the robot facilitates the improvement of obstacle detection and avoidance techniques through integrated sensors. Automatic adjustment of cutting and movement parameters based on the terrain is another research direction, which can lead to optimizing the robot's performance in various environments. Analyzing and improving safety and reliability in usage and maintenance is crucial for ensuring continuous and efficient operation. The robot has varied applications in parks, gardens, sports fields, and industrial spaces, demonstrating a vast potential for use in space maintenance.

The autonomous tennis ball collection robot is equipped with a differential locomotion system that allows for efficient movement, an adaptive collection system, and a complex sensory system for detecting and collecting tennis balls. The collection subassembly enables the gathering of multiple balls simultaneously and adjusts the collection height based on the playing surface, which can be smooth and flat—such as a cement court—or uneven, as in the case of a clay court. The location of the balls is achieved using a camera programmed to identify their green color. The visual sensor provides a set of four values for each detected object, which are subsequently integrated into navigation strategies. The collection robot offers the opportunity to conduct research studies related to the analysis of ball detection methods on the court and the influence of environmental factors, such as light, on the performance of the mechatronic system. Another research direction focuses on the navigation strategies used for the robot's movement, aiming to optimize the collection process.
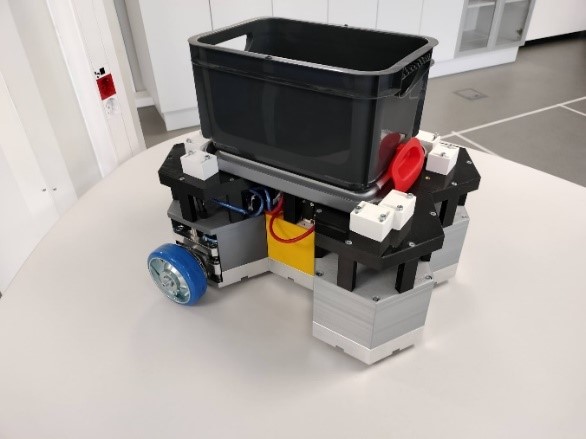
The modular mobile platform is designed to utilize directly connected modules without the need for an additional frame specific to a particular configuration. The basic geometric shape of the modules is a hexagon, allowing for the construction of a robotic unit with various component modules. This type of mobile platform can be integrated into a series of research projects that investigate how the characteristics of the locomotion system, especially the types of wheels and structural configurations, can affect the ability of autonomous robots to move efficiently and perform specific tasks in various industrial environments. This modular approach offers flexibility in adapting mobile robots and autonomous vehicles to handle complex applications.